
 A cura di:
A cura di:
GADOLA Marco
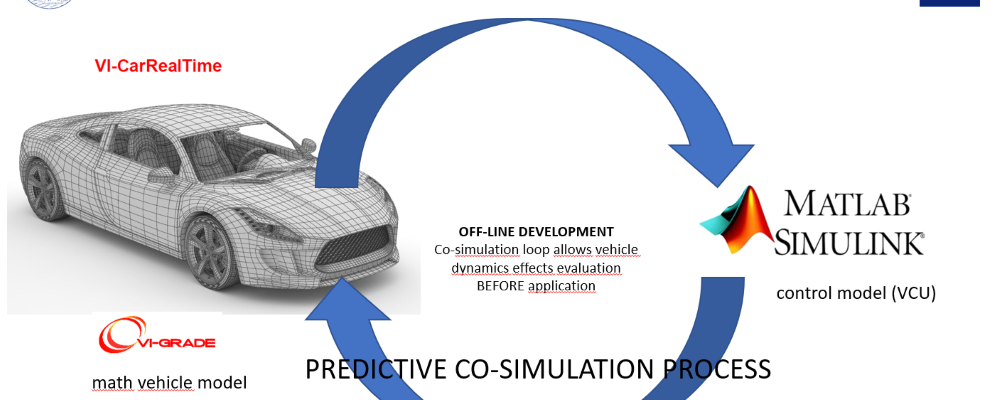
L’attività, articolata nei due contratti di ricerca “Definizione di un modello generico di dinamica del veicolo da inserire in una unità di controllo a bordo veicolo da integrare in una VCU di progettazione e produzione TEXA” e “Definizione di un modello generico di dinamica del veicolo da inserire in una unità di controllo a bordo veicolo da integrare in una VCU di progettazione e produzione TEXA: FASE A. Impostazione delle logiche di controllo base con sviluppo in ambiente software e Driver-In-the-Loop e FASE B. Sviluppo delle logiche di controllo base su prototipo di vettura full-electric” ha coperto dodici mesi complessivi. Sono stati realizzati algoritmi di controllo della dinamica del veicolo per strategie di Torque Vectoring, Traction Control, Anti-Rollover etc e stimatori di angolo di assetto e velocità assoluta del veicolo in ambiente Matlab-Simulink, anche in collaborazione con la Sheffield Hallam University (UK). Gli algoritmi sono stati testati in co-simulazione con il software VI-CarRealTime ed anche in real-time su alcuni simulatori di guida. Il codice è stato realizzato secondo gli standard automotive ISO26262 e MAAB. La validazione del modello di veicolo base è stata eseguita caratterizzando una vettura di riferimento opportunamente strumentata durante una campagna di testing con un collaudatore professionista svolta nel proving ground di Nardò in Puglia, di proprietà di Porsche Engineering.
Partner dell’attivita’: TEXA Spa, Sheffield Hallam University (UK)
Dipartimento: DIMI
Anni di svolgimento: 2018 – Presente
Record ID: 337